My current project is focusing on a pure 3.3v setup, both MPU and sensors. I've been experimenting with various cheap sensors from both SparkFun and eBay sellers from China to fill the various sensor "slots" my final module should have.
One of them is Motion Sensing.
The
PIR Motion Sensor from SparkFun looked good at first but I was concerned with the problems it seemed to have running at 3.3v.
All the other PIR Sensors on eBay seemed to have the same setup with some onboard voltage regulator. 1.7v
Voltage Dropout on these regulators prevent an already regulated 3.3v source from powering it out-of-the-box. Or so I thought...
The even more expensive sensor from Parallax looked fine but at $11 it was going to add up with a lot of my sensors. I felt a little more comfortable tinkering with a cheap sensor from China than the others so I ordered two sensors from two different eBay merchants at around $3.
Unreliable at 3.3v
Hooking these sensors up to my Programmable XBee with a did not go as well as I had hoped. The sensor simply didn't work with a 3.3v VCC source just like the SparkFun sensor. The signal was wildly erratic as if someone was moving randomly in front of the sensor:
#3064 TMP102=22.19 Door=CLOSED Motion=NO
#3068 TMP102=22.19 Door=CLOSED Motion=NO
ALARM: Motion
#3072 TMP102=22.19 Door=CLOSED Motion=NO
#3076 TMP102=22.19 Door=CLOSED Motion=YES
ALARM: Motion
#3080 TMP102=22.19 Door=CLOSED Motion=NO
ALARM: Motion
#3084 TMP102=22.25 Door=CLOSED Motion=YES
#3088 TMP102=22.25 Door=CLOSED Motion=YES
ALARM: Motion
#3092 TMP102=22.25 Door=CLOSED Motion=YES
#3096 TMP102=22.19 Door=CLOSED Motion=YES
Reliable but useless at 5v
Connecting it to a 5v source fixed the problem just like others:
#3872 TMP102=22.19 Door=CLOSED Motion=NO
#3876 TMP102=22.19 Door=CLOSED Motion=NO
#3880 TMP102=22.19 Door=CLOSED Motion=NO
ALARM: Motion
#3884 TMP102=22.19 Door=CLOSED Motion=YES
#3888 TMP102=22.19 Door=CLOSED Motion=NO
#3892 TMP102=22.19 Door=CLOSED Motion=NO
#3896 TMP102=22.19 Door=CLOSED Motion=NO
#3900 TMP102=22.19 Door=CLOSED Motion=NO
#3904 TMP102=22.25 Door=CLOSED Motion=NO
However this makes it a borderline unusable sensor since I won't have 5v on my final module. Fortunately I stumbled on an interesting hack that most likely will work fine at 3.3v permanently.
Knowing enough to cause damage
I'm actually just getting back to hardware tinkering after a 15 year hiatus doing software. This reminds me of learning how to code by just messing with source and seeing what happens.
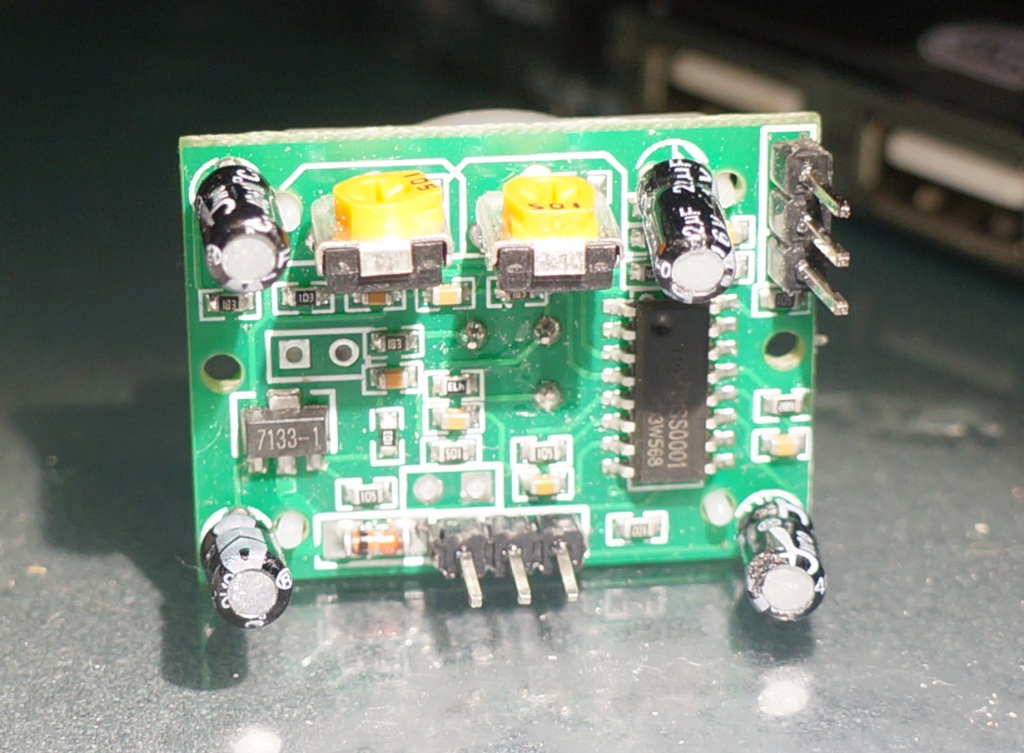
After probing the voltage regulator I confirmed that the sensor had a
7133-1 regulator which does have a 1.7v Voltage Dropout. That's sad since I was hoping to be lucky with something closer to Parallax's design that can take input down to about 3v.
Probing around with the multimeter I confirmed the 5v in and 3.3v out on the 7133 regulator. I also found a pure 3.3v at the lower right capacity's outer leg which rings right with what I just read about voltage regulators and noise in
SparkFun's Beginning Embedded Electronics. It looked like that capacitor would be an easier point to inject my already clean 3.3v power into the sensor than shorting out the regulator.
Easier 3.3v access?
Looking at the backside of the circuit board I could see a small trace from the newly discovered 3.3v capacitor's positive pin crossing over to... the H-pin? After another attempt at tracking down a schematic I found something similar over at openimpulse.com.
Their schematic looked showed the sensor's 3-pin was connected directly to V-out from the regulator and the whole rest of the 3.3v trunk! Its main purpose is to bring the
BISS0001's A-line either high or low but let's use it as a 3.3v VCC instead.
Final 3.3v Hack and No Damage
Probing the three pins I found one of them being exactly 3.3v. After moving over the gray cable over from a 5v to a 3.3v source, I plugged the other end into pin-3. The sensor worked perfectly and reliably, just as when it was powered by 5v!
3.3v motion detecting PIR sensor done without any soldering.